































Vincitore generale: squadra Bullseye da l'Università di Wageningen, Paesi Bassi; I travaglii di freestyle cù cuncetti visionari; A simulazione di campu prova una sfida cù grandi benefici di apprendimentu; Più di 500 spettatori internaziunali in linea in trè ghjorni
(DLG) Partenariatu da DLG Feldtage è quist'annu, per a prima volta, tenutu in formatu virtuale nantu à a piattaforma digitale di DLG, u 18th International Field Robot Event, un cuncorsu di robot di campu per squadre studienti internaziunali, hà finitu in una nota alta cù l'annunziu di i vincitori, presentati da l'urganizatori, Hohenheim University è Wageningen University. U vincitore generale di l'avvenimentu 2021 hè a squadra Bullseye di l'Università di Wageningen, Paesi Bassi, chì hè stata ghjudicata nantu à a so prestazione in quattru attività di campu stabilite chì includenu navigazione in fila curva di mais, in fila dritta cù o senza piante mancanti, ricunniscenza di erbaccia è lettiera. è successiva rimuzione à u promontoriu. L'avvenimentu di freestyle, un avvenimentu facultativu chì permette à e squadre di studienti di mostrà a so prudenza ingegneria risolvendu un compitu agriculu auto-selettu, hè stata vinta da a squadra Ceres, Università di Scienze Applicate di Münster cù u so robot di cugliera chì hà sappiutu detectà è coglie zucche. .
518 telespettatori internaziunali si sintonizzanu
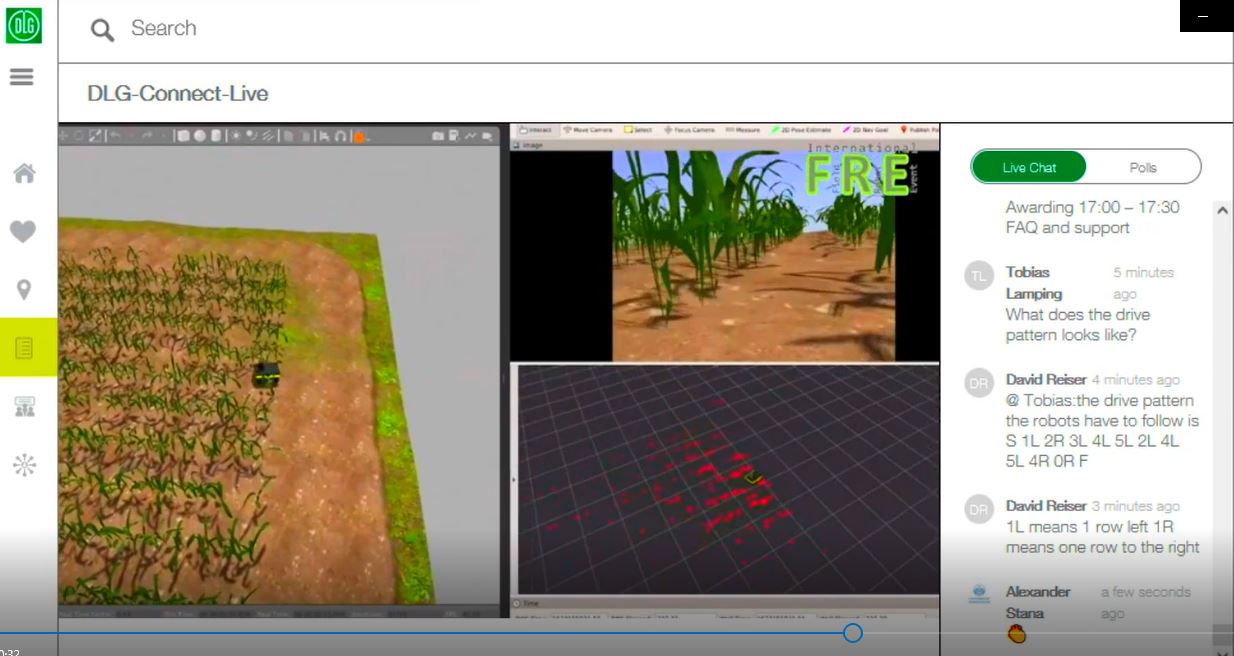
L'avvenimentu hà attiratu 518 spettatori da u mondu sanu, cumpresi micca solu specialisti tecnichi è accademichi, ingegneri, staffi universitarii è studienti, ma ancu agricultori da una varietà di paesi. I participanti di l'industria, cum'è i gestori di produttu, anu assistitu ancu à l'avvenimentu in diretta, chì era cupartu da i ghjurnalisti internaziunali, sintonizzandu per fighjulà i robots chì facenu in un ambiente di simulazione foto-realisticu simile à quellu utilizatu da a NASA per l'esplorazione spaziale. Via una chat in diretta, i telespettatori anu avutu l'uppurtunità di interagisce cù e 14 squadre internaziunali da Danimarca, Germania, Paesi Bassi, Romania è Slovenia, è ancu esperti è altri telespettatori.
Premiu di Cullaburazione per u sviluppu di campi di mais virtuale
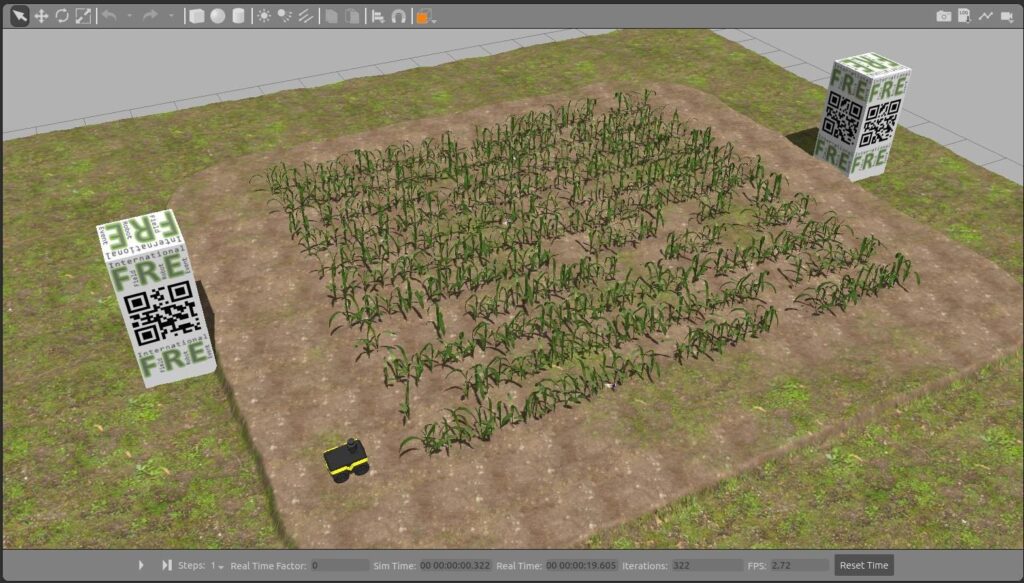
U Premiu di Cullaburazione Onorariu hè statu attribuitu à Kamaro Engineering, una squadra di studianti ingegneria per i robot di campu innovatori da l'Istitutu di Tecnulugia di Karlsruhe (KIT). U premiu di cullaburazione ricunnosce a cuntribuzione à u sviluppu di u campu di mais virtuale in l'ambienti simulati. Stu travagliu implicava a scrittura di codice chì descriva accuratamente ciò chì parevanu una pianta di mais è altri cumpunenti, è ancu di creà effetti di a vita reale cum'è u ventu è l'ombra per attuà una serie di scenarii di campu agriculu, in particulare u ricunniscenza di erbaccia è a rilevazione di ostaculi.
Dui squadre di talenti in età scola
Quist'annu, duie squadre - Carbonite è Camper Robotic - sò custituiti da i zitelli d'età di scola cun talentu tecnicu da e cità tedesche Hamburg è Überlingen rispettivamente. A squadra di Camper Robotic avia sviluppatu un tipu unicu di robot "Segway" chjamatu Field Balancer. A squadra di Carbonite hà eccellendu in parechje attività, venendu terzu in generale.
"Stu avvenimentu virtuale era una prima è simu assai cuntenti di u risultatu è di i feedback da i studienti. Un ambiente simulatu hè una grande parte di u travagliu di sviluppu per un robot di campu. Credu chì questu avvenimentu, chì si svolge in diretta in un ambiente simulatu, hè un eserciziu grande è sfida per ùn solu stabilisce ciò chì u sistema hè capacitu, ma ancu per benchmarklu cù altre squadre. Questu avarà benefici di apprendimentu significativu per parechji mesi à vene ", disse u prufessore Hans W. Griepentrog, Direttore, Sezione di Tecnulugia in Produzione di Cultivi, Università di Hohenheim, Germania.
"L'ambienti di simulazione ROS Gazebo, chì avemu creatu apposta per questu avvenimentu, sò stati utili à e squadre di i studienti è per quessa avemu decisu di mantenenu dispunibuli dopu à u cuncorsu, in modu chì i studienti ponu pruvà e so future simulazioni di robot di campu nantu à quella piattaforma, ", hà cunclusu u prufessore Griepentrog.
Eventu freestyle - cuncetti futuri
U compitu di freestyle in l'avvenimentu hè sempre un puntu culminante di u spettatore è offre una finestra in u futuru cù cuncetti visionari per l'applicazioni di campu, selezziunati è sviluppati da e squadre stesse. Una categuria facultativa in u cuncorsu, u compitu offre à e squadre di studienti l'uppurtunità di dimustrà e so cumpetenze per sviluppà una suluzione per un compitu praticu di campu di a so scelta. À l'avvenimentu di questu annu, i travaglii di freestyle sò stati presentati da i studienti cum'è video. I travaglii di freestyle includenu un robot di cugliera da Ceres, vincendu a categuria di freestyle. U sicondu, sviluppatu da a squadra FarmBeast, l'Università di Maribor, era un implementu di spraying capaci di ricunnosce l'erbaccia è a spruzzatura di destinazione solu induve necessariu, cuntribuiscenu à a prutezzione di a terra. In u terzu postu era a squadra Kamaro cù u so robot di campu Beteigeuze, chì si prisenta cum'è un robot di campu modulare autoconfigurante cù parechje attache, cumprese l'attrezzi basati in trailer.
L'avvenimentu internaziunale di robot di campu hè un cuncorsu internaziunale di robot di campu chì include diverse attività di campu. Navigazione di u robot trà e fila di culturi curve, ricunnosce l'uggetti chì sò erbaccia o semplicemente spazzatura è cartografia l'uggetti utilizendu geo-riferimentu sò parte di e sfide chì sò risolte da i robot di campu chì utilizanu sensori è algoritmi. L'interpretazione di l'infurmazioni in tempu reale, cum'è a determinazione di ciò chì hè erbaccia cù una camera hè cumplessa, è richiede parechji mesi di travagliu di sviluppu prima. Un altru compitu hà bisognu di caccià l'erba è a littera, induve hè necessariu un cuntrollu precisu di u software di l'attuatori chì operanu l'utillita. A sfida hè di fà un sensu intelligente di e dati nantu à u ghjornu, chì implica u robot chì interpreta l'infurmazioni datu è pigliate decisioni ottimali. A cumplessità, u rendiment è l'utilità agricula eranu criterii di ghjudiziu chjave.
Video di cuncorsu dispunibule
I video nantu à dumanda di l'avvenimentu di robot di campu di trè ghjorni, chì includenu tutti i travaglii di campu simulati, cummentarii da i ghjudici è i video sottumessi da e squadre per u compitu di freestyle, sò dispunibuli nantu à a piattaforma in linea di DLG cum'è ligami separati per ogni ghjornu di l'avvenimentu:
8 ghjugnu : Navigazione in un campu di granu cù fila curva ; Fila dritta cù e piante mancanti. Member
9 di ghjugnu: rilevazione di erbaccia è di l'ughjettu è georeferenziazione; rimozione à a punta. Member
10 ghjugnu : Avvenimentu Freestyle. Member
I dettagli completi di i vincitori di ognuna di e cinque categurie è i so punteggi sò dispunibuli nantu. https://www.fieldrobot.com/event/
L'avvenimentu internaziunale di robot di campu hè statu tenutu nantu à a piattaforma digitale di DLG, chì hè ancu casa di avvenimenti agriculi digitali à grande scala. A piattaforma hè una piattaforma di cunnessione chì offre à i so utilizatori u cuntenutu di u produttu è l'interazzione individuale, di gruppu o publicu.
Ricerca pratica di robot di campu dapoi u 2003
U cuncorsu di robot di campu, chì hè statu lanciatu in u 2003 da l'Università di Wageningen in i Paesi Bassi, prova a robotica pioniera è e tecnulugia di l'agricultura di precisione in cundizioni reali, è dà à i ghjovani scientisti l'uppurtunità di scambià è di sviluppà e so idee à fiancu à i so pari. Cum'è l'avvenimentu di campu, i cuncurrenti in l'avvenimentu virtuale anu avutu l'uppurtunità di interagisce cù l'altri è cù i telespettatori internaziunali. Questa interazzione hè una parte impurtante di l'avvenimentu è aiutava à avanzà i so cuncetti.
U 2021 Field Robot Event, chì hè statu tenutu à a mostra DLG-Feldtage da u 2014, hà furnitu esigenti testi virtuali per i robots è i so inventori, è ancu un divertimentu eccitante per i telespettatori virtuali.]

{kind=link}